Logger and Parser
Mono_logger.vi
User should connect the output of the sensor to the Data input of the mono_logger.vi as follows depending on the type of sensor:
| Sensor | Connection |
|---|---|
| Camera | Raw data |
| RPM | Raw data |
| State Sensor | State sensor sample |
| Ultrasonic | Raw data |
| LiDAR | Raw data |
| Semantic LiDAR | Raw data |
| Collision | Raw data |
| IMU | Raw data |
| Radar | Target list |
| Radar Cube | Radar Data Cube |
This VI will produce a binary file for the following sensors:
- IMU
- LiDAR
- Camera
- GPS
- RPM
- Radar Cube
This VI will produce a text file for:
- Ultrasonic
- State Sensor
- Collision
- Radar
- Camera annotation (if Annotation flag set to true)
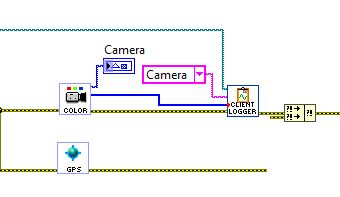
Example
Mono_parse_binaries.vi
This tool can help the user to visualize data from a binary file.
- Browse to the file you want to parse.
- Select the type of sensor you want to parse.
- For camera images add a path to save the images.
- For LiDAR set the VeloView port you want to stream the LiDAR data.