Scenario File Creation
The monoDrive Scenario Editor allows users to create their own scenarios by controlling various different aspects of AI vehicle behavior. The scenario file is used when running the Simulator and/or the Scenario Editor in closed loop mode.
Placing Vehicles in a Scene
The first step in creating a scenario is setting up the monoDrive vehicles in the desired scene and applying driving properties to each. To place a vehicle:
-
In the "Content Browser" navigate to the folder
Content/Vehicles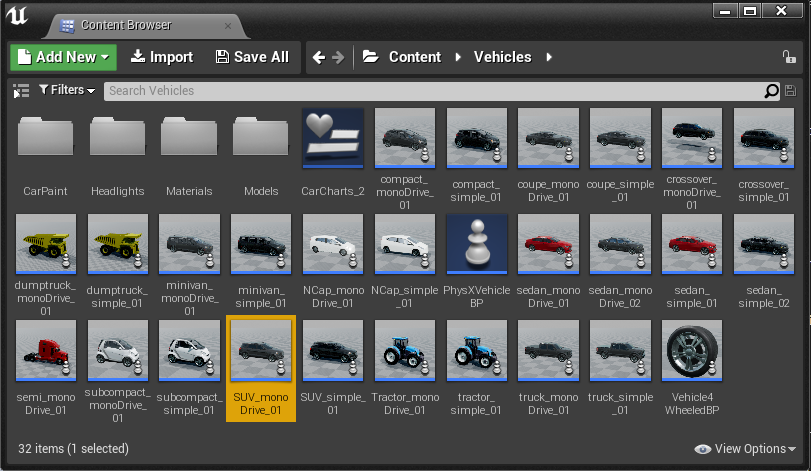
-
Drag one of the vehicles into the scene by click on the vehicle's icon and putting it on the desired lane of travel.
-
In the "Details" window, search for the "Vehicle Controller Settings" group and and set the desired vehicle controller settings.

-
In the "Details" window, search for the "Vehicle Behavior Settings" group and set the desired vehicle behaviors for traffic laws.

-
At the top of the Scenario Editor hit the "Play" button. The vehicle should begin to travel down the lane closest to its original placement.
-
Repeat this with multiple vehicles until the scene is populated as desired.
Detailed Vehicle Behavior Settings
The "Vehicle Settings" section of a vehicle's details contains two types of behavior settings: vehicle controller settings and vehicle behavior settings.
Vehicle Controller Settings
The first section, "Vehicle Controller Settings", contains several settings relative to vehicle behavior for speed and control:
-
Set Speed: Sets the desired speed of the vehicle as a delta above or below the road's speed limit in miles per hour. For example, if the road's set speed limit is 40mph, a value of "0" would result in the vehicle moving at a speed of 40mph, and with a value of "-20", the vehicle's speed would be 20mph. When the "Obey Road Speed Limits" is not set, the input in this field sets the speed of the vehicle (in miles per hour) without regarding the road's speed limit.
-
Initial Speed: Sets the initial speed of the vehicle as a delta above or below the road's speed limit in miles per hour. When the "Obey Road Speed Limits" is not set, the input in this field sets the speed of the vehicle (in miles per hour) without regarding the road's speed limit.
-
Delayed Start: The number of seconds to wait before moving this vehicle.
-
Show Vehicle Charts: If set, then vehicle dynamics charts will be shown. Charts display information about Steering, Speed, Acceleration, Gear, Engine RPM, and Throttle. To the right of the charts, the speed of the vehicle is displayed in miles per hour.

-
Debug Drawing: If set, then debug vehicle information will be drawn in the editor.

-
Search Forward Distance: The number of centimeters to look ahead when computing AI actions. If speeds are much higher than 70mph consider increasing.
-
Search Backward Distance: The number of centimeters to look backward when computing AI actions.
-
Lane Offset: The number of centimeters to drive from the lane center: positive is right, negative is left.
-
Steer Forward Distance: The range of centimeters to look ahead when performing steering AI actions, interpolated based on
steerForwardSpeedRange. -
Steer Forward Distance During Lane Change: The range of centimeters to look ahead when performing steering AI actions during a lane change, interpolated based on
steerForwardSpeedRange. -
Steer Forward Speed: The range of speed (mph) used to LERP
steerForwardDistance. -
Rolling stop speed: The speed to travel before continuing after a legal stop.
-
Distance to Stop Sign: The number of centimeters to stop before a controlled intersection.
-
Spawn Offset: The offset to apply to the vehicle position prior to spawning.
-
Acceleration Constraints: The minimum and maximum acceleration of the vehicle used by AutoPilot. cm/s^2.
-
Changing Lanes: Whether the vehicle is in the middle of a lane change.
-
Turn Pref: (Turn Preference) At the next turn the vehicle will prefer to take this turn. This will reset the drop down menu to "NONE" after the following turn.
-
Simple Speed Look Ahead: The number of centimeters to look ahead when performing simple speed control.
-
Point PID: PID Controller settings for point control.
-
Speed PID: PID Controller settings for speed control.
Vehicle Behavior Settings
The "Vehicle Behavior Settings" section of a vehicle's settings contains options for obeying (or not) traffic laws:
-
Ignores Lane Change Boxes: If set, all lane change trigger boxes will be ignored.
-
Ignore Other Vehicles: If set, all other vehicles will be ignored when computing AI actions.
-
Ignore Traffic Signals: If set, this vehicle will ignore all traffic control devices.
-
Obey Road Speed Limits: If set, this vehicle will obey the speed limits of the road and set speed and initial speed will be a delta above or below the road's speed limit.
-
Limit Speed in Curves: If set, this vehicle will attempt to slow down in order to properly corner in turns.
-
Initial Speed is Delta: If set, when vehicle is obeying road speed limits, the initial velocity will be used as a delta above or below the speed limit. If vehicle is not obeying road speed limits this setting is ignored.
-
Destroy on Collision: If set, this vehicle will be removed in the scene after colliding with another physics body.
-
Snap to Lane: If set, this vehicle will search for the nearest lane and snap to it at spawn.
-
Trigger Sleep Time: A vehicle might hit a dynamic trigger box more than once as they are in motion, to avoid double triggering, behavior can only be modified by the same trigger component again after this many seconds.
Tagging System
The Simulator's tagging system is used to specific attributes for desired actors in a recording. The tags for each actor can be seen by clicking on the actor and scrolling down to the actor's "Actor" group and looking under the "Tags" array.

There are two categories of tags:
-
Desired Tags: These are tags of elements that will be included in the trajectory.
-
Undesired Tags: These are tags of elements that will not be included in the trajectory. Typically users do not want to record elements that have the "static" tag.
NOTE: You must have a vehicle with the tag "ego," otherwise it cannot be used with the monoDrive client.
Scenario Setup/ Scenario File Tool Widget
By opening the Scenario File Tool Widget, users can save scenarios to monoDrive scenario files that can then be used in the Closed loop modes of the monoDrive Simulator and Scenario Editor. New Scenario files can be sent to the running simulator to replay dynamic actors for testing and review.
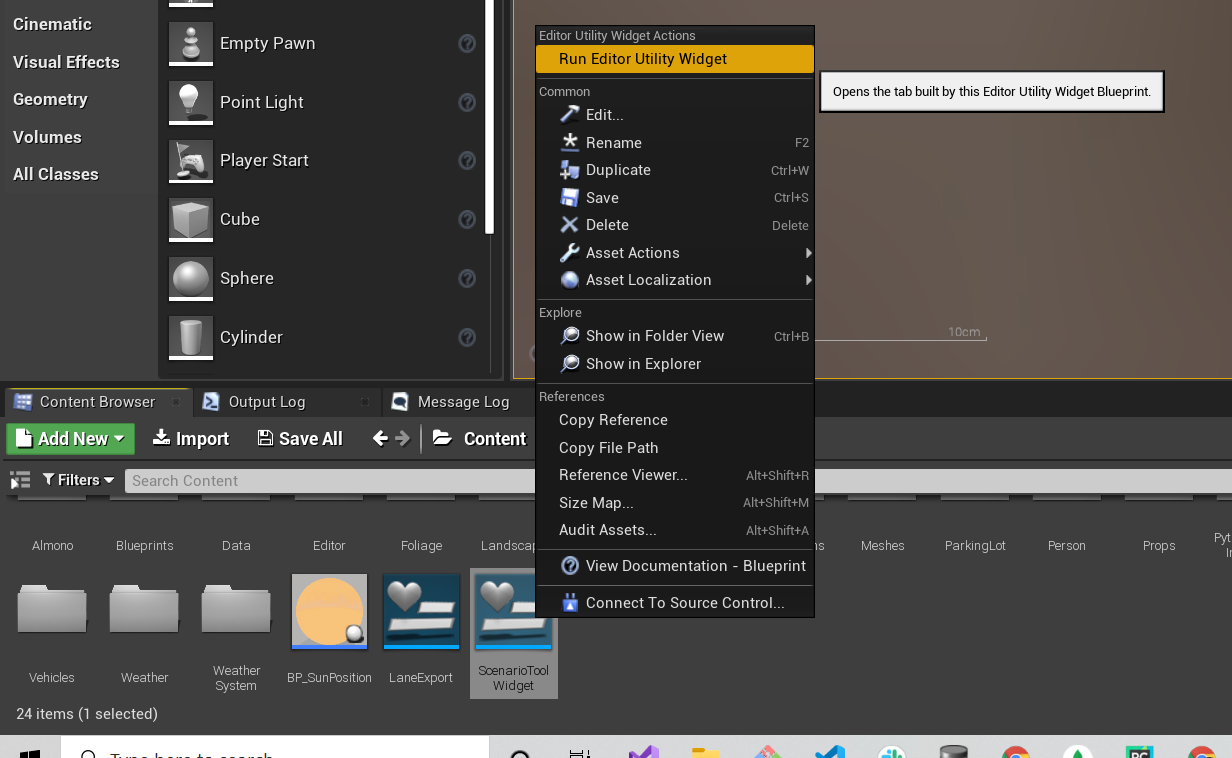
To begin, find the tool under the Content Folder, right-click and select Run Editor Utility Widget.
In the "Scenario File Tool Widget," the user can load or save a new scenario file. Selecting "Save" will write the scene's current configuration to the specified file on FilePath. This will overwrite any file that has the same name.
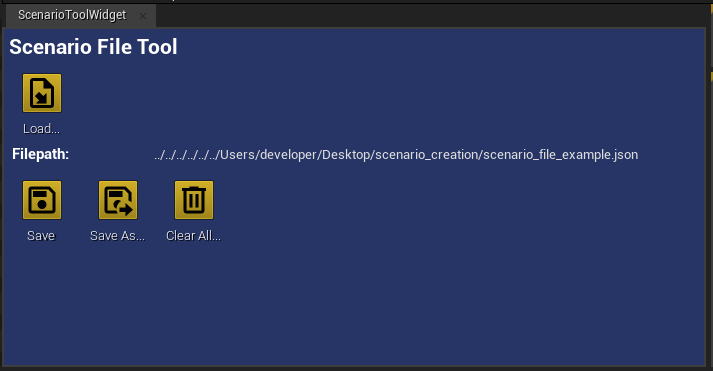
It is important to Clear All assets on the editor before using any client to playback the scenario. Failing to do that, may cause issues with the playback.