LiDAR
The monoDrive LiDAR sensor simulates Velodyne LiDARs in both 16 and 32 laser variants. The output of the LiDAR matches the documented output of commercial Velodyne LiDARs.
{
"type": "Lidar",
"horizontal_resolution": 0.400000005960464,
"listen_port": 8200,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"max_distance": 8000.0,
"n_lasers": 16,
"reset_angle": 0.0,
"rpms": 300.0
}
- max_distance: The maximum distance in centimeters the LiDAR laser will travel.
- horizontal_resolution: The horizontal angle in degrees the LiDAR must rotate before shooting out the next set of lasers. Range from 0.1 to 0.4.
- rpms: The expected number of revolutions per minute for a full 360 degree sweep. Controls the expected time between laser lines.
- n_lasers: The number of lasers the LiDAR sensor shoots out per sweep. This can be set to 16 (VLP-16), 32 (HDL-32).
- reset_angle: The angle that indicates a full revolution (i.e. full 360 degree revolution will start at this reported angle).
Semantic LiDAR
{
"type": "SemanticLidar",
"horizontal_resolution": 0.400000005960464,
"listen_port": 8210,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"max_distance": 8000.0,
"n_lasers": 16,
"reset_angle": 0.0,
"rpms": 300.0
}
The configuration values are the same as LiDAR. The following table shows the semantic definition for each pixel value:
| Asset | Grayscale Pixel Value |
|---|---|
| ego vehicle | 2 |
| car | 3 |
| motorcycle | 4 |
| bus | 6 |
| truck | 8 |
| fence/guardrail | 5 |
| traffic light | 10 |
| person | 11 |
| bicycle | 12 |
| building (shipping containers) | 15 |
| traffic signs | 20 |
| lane markers | 70 |
| terrain | 80 |
| foliage | 85 |
| gravel | 100 |
| power lines | 110 |
| pylons | 115 |
| sky | 141 |
| street light/pole | 153 |
| road | 175 |
| sidewalk | 190 |
| road art | 193 |
Raw Output
The output format of the 16 laser LiDAR matches that of the Velodyne Puck Hi-Res in single return mode. The output of the 32 laser LiDAR matches that of the Velodyne HDL-32E in single return mode. Both of these models have a well documented format in their respective product manuals.
Each data packet from the LiDAR sensor contains 1206 bytes.
There are 12 data blocks, each block is 100 bytes and there are 4 bytes
for the timestamp and 2 bytes called factory bytes. The number of packets
for a revolution depends on the horizontal revolution.
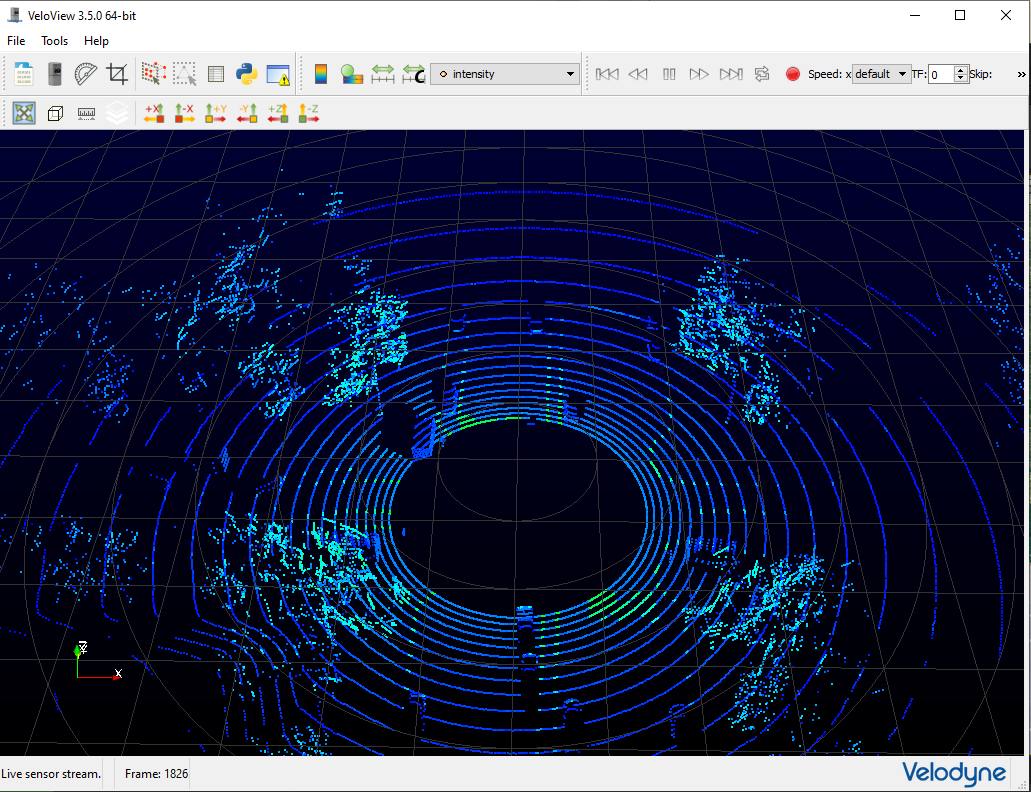
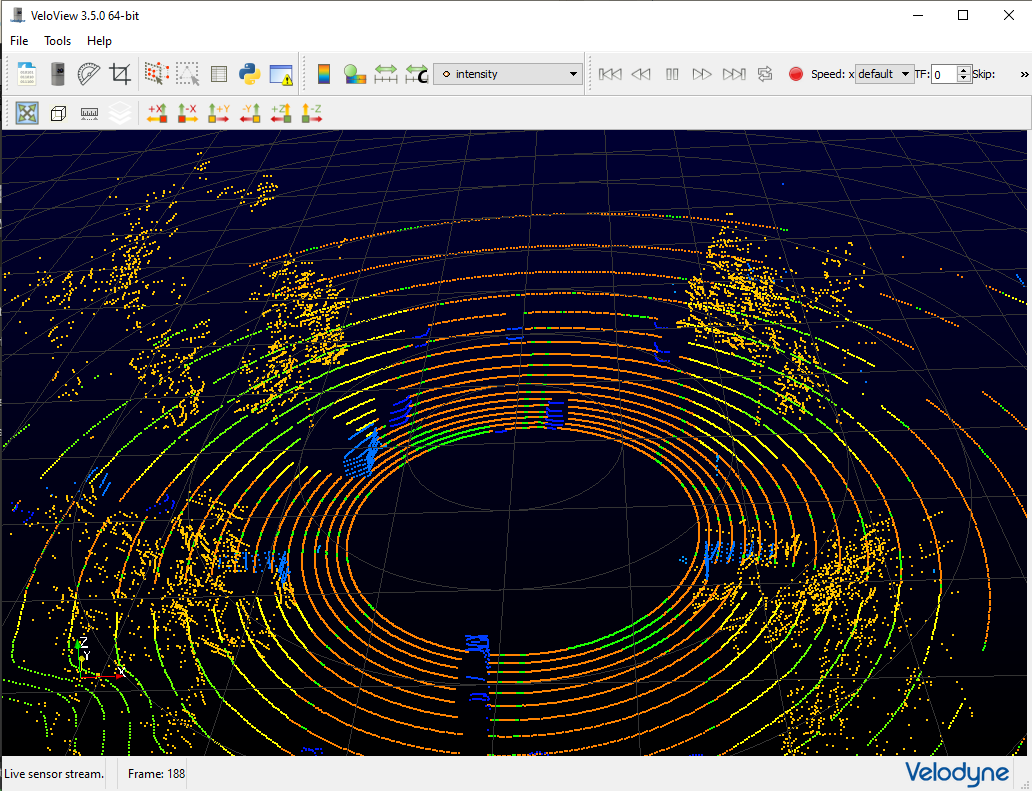
Visualizing LiDAR Output
The output of the LiDAR can be streamed over UDP (enabled by default with the monoDrive LabVIEW client). To visualize the output you will need to:
- Download and run VeloView
- Click
Sensor Stream, and select the correct configuration (Puck Hi-Res or HDL-32). - Run the monoDrive Simulator, configure the monoDrive LabVIEW client with a LiDAR
- When the LiDAR data starts streaming, VeloView will display the LiDAR points