mono_light_API_example.vi
Description
Enables users to control the vehicle's steering, throttle, brakes, starting position, and weather simulation. This example enables the user to configure and update multiple settings for lights in the ego vehicle.
This is a free driving scenario with one car only
For technical support contact us at monodrive.support@ni.com
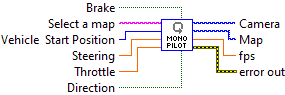
Inputs
-
Throttle: Change the vehicle's throttle (0 - 1)
-
Steering: While driving, move the vehicle right and left (-1 to 1)
-
Brake: When pressed, the vehicle stops (False by default)
-
Direction: Move the car forward or backward (move forward by default )
-
Vehicle Start Position: Select a position from the pre-defined initial position to spawn the ego vehicle.
- Select -1 to spawn the vehicle on the position of the camera.
- Select 0 to spawn the vehicle on the position specified on the Closed_loop.json file
-
Select a map: Select the map to load on the Simulator
-
error in (Error Cluster): Accepts error information wired from previously called VIs. This information can be used to decide if any functionality should be bypassed in the event of errors from other VIs.
Outputs
-
Camera: Shows the camera sensor output
-
Map: Shows a graphic representation of the complete map loaded on the simulator
-
fps: Frames per Second at which the client is running
-
error out (Error Cluster): Accepts error information wired from previously called VIs. This information can be used to decide if any functionality should be bypassed in the event of errors from other VIs.