LiDAR
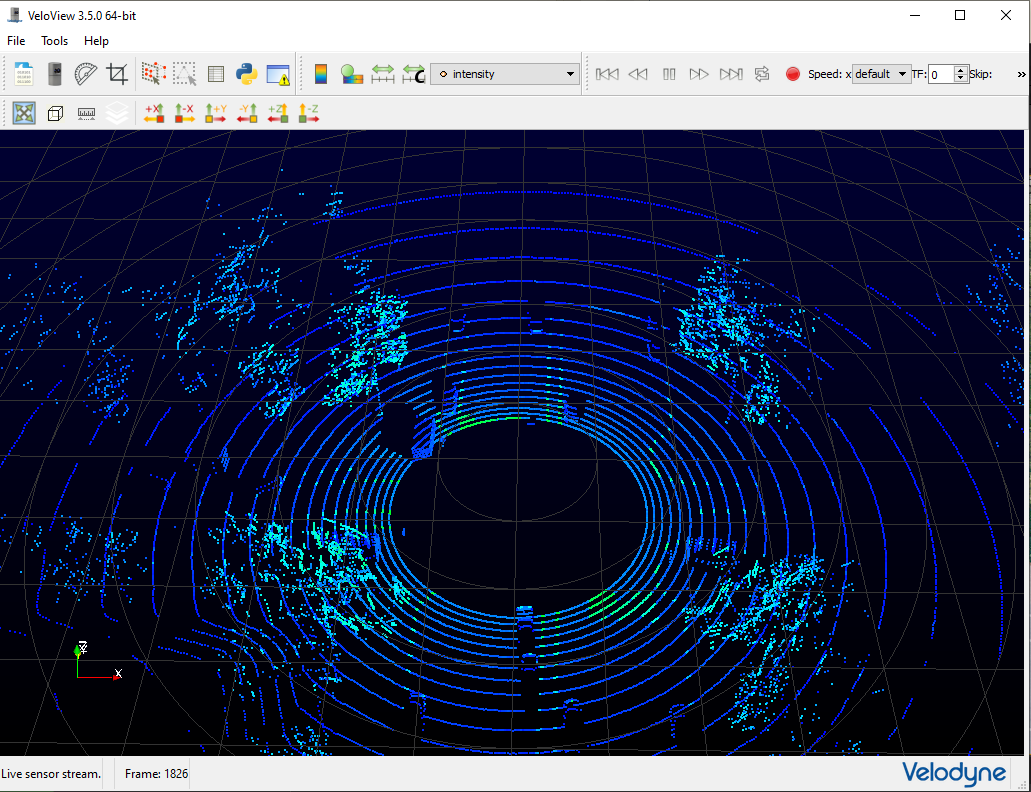
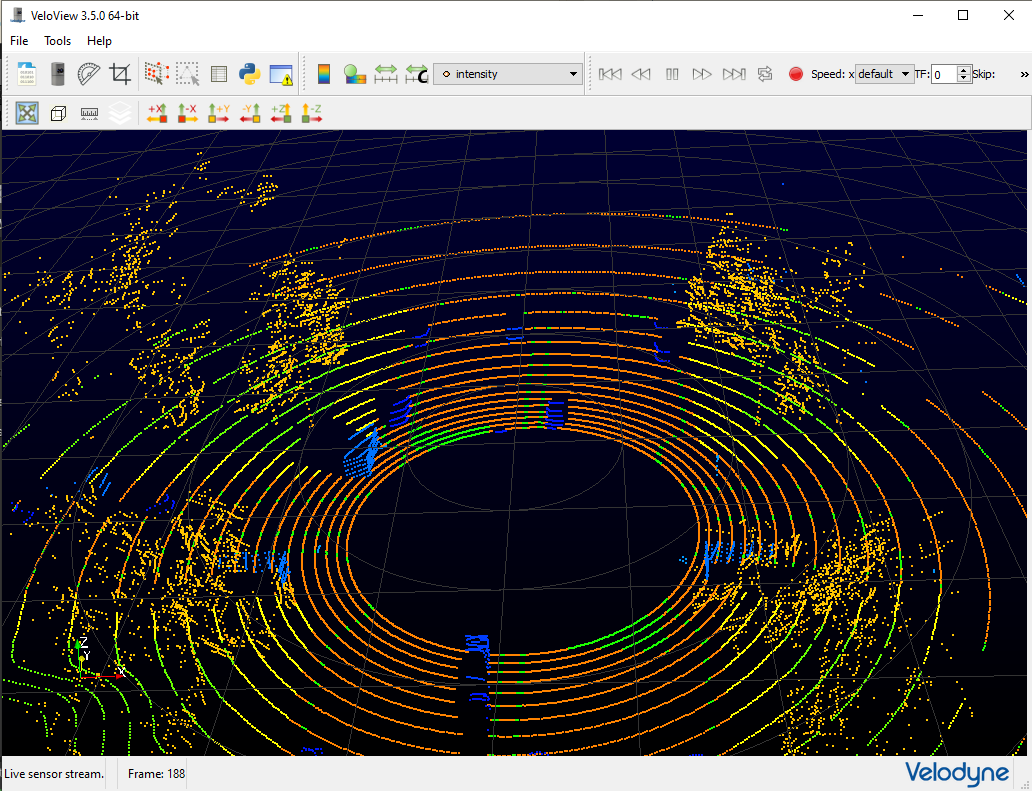
The monoDrive LiDAR sensor simulates Velodyne LiDARs in both 16 and 32 laser variants. The output of the LiDAR matches the documented output of commercial Velodyne LiDARs.
{
"type": "Lidar",
"horizontal_resolution": 0.400000005960464,
"listen_port": 8200,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"max_distance": 8000.0,
"n_lasers": 16,
"reset_angle": 0.0,
"rpms": 300.0
}
- max_distance: The maximum distance in centimeters the LiDAR laser will travel.
- horizontal_resolution: The horizontal angle in degrees the LiDAR must rotate before shooting out the next set of lasers. Range from 0.1 to 0.4.
- rpms: The expected number of revolutions per minute for a full 360 degree sweep. Controls the expected time between laser lines.
- n_lasers: The number of lasers the LiDAR sensor shoots out per sweep. This can be set to 16 (VLP-16), 32 (HDL-32).
- reset_angle: The angle that indicates a full revolution (i.e. full 360 degree revolution will start at this reported angle).
Semantic LiDAR
{
"type": "SemanticLidar",
"horizontal_resolution": 0.400000005960464,
"listen_port": 8210,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"max_distance": 8000.0,
"n_lasers": 16,
"reset_angle": 0.0,
"rpms": 300.0
}
The configuration values are the same as LiDAR. The following table shows the semantic definition for each pixel value:
| Asset | Grayscale Pixel Value |
|---|---|
| ego vehicle | 2 |
| car | 3 |
| motorcycle | 4 |
| bus | 6 |
| truck | 8 |
| fence/guardrail | 5 |
| traffic light | 10 |
| person | 11 |
| bicycle | 12 |
| building (shipping containers) | 15 |
| traffic signs | 20 |
| lane markers | 70 |
| terrain | 80 |
| foliage | 85 |
| gravel | 100 |
| power lines | 110 |
| pylons | 115 |
| sky | 141 |
| street light/pole | 153 |
| road | 175 |
| sidewalk | 190 |
| road art | 193 |
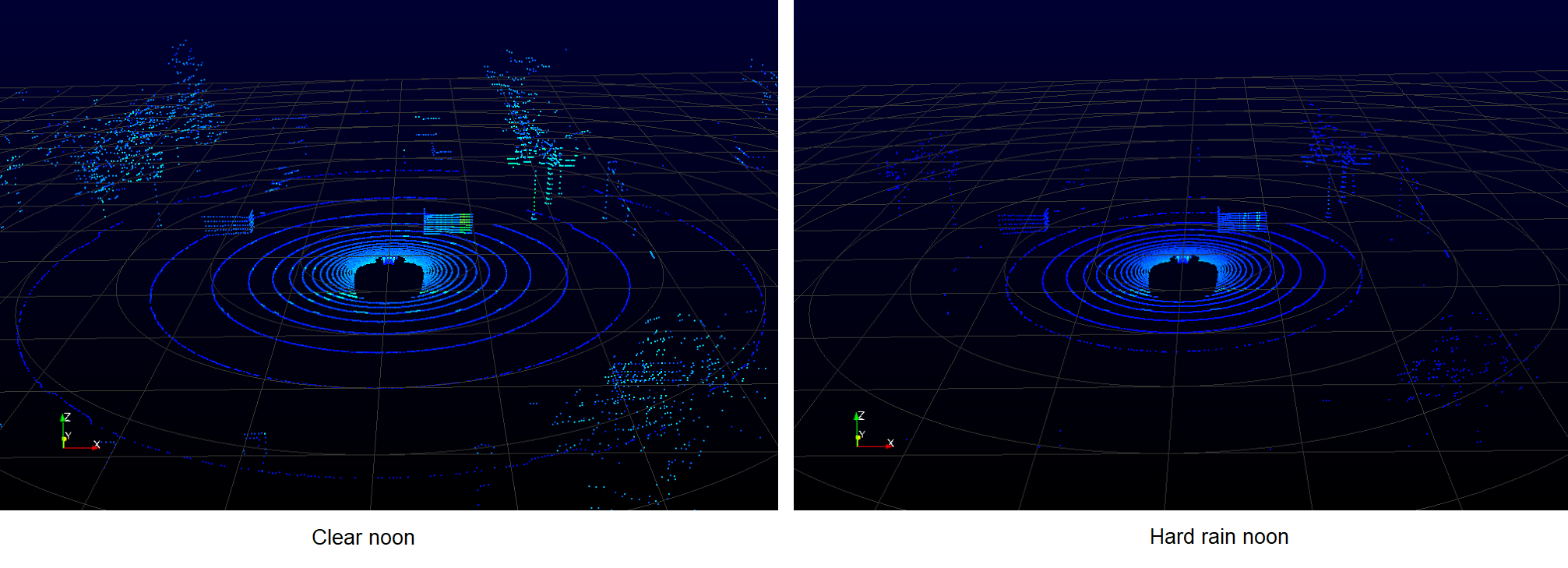
Weather effect
NEW in 1.14 release
LiDAR data output shows attenuation as an effect of the weather conditions.