Common
Every monoDrive sensor shares the following format for common sensor properties. For additional parameters descriptions of specific sensors, see the sensor's configuration documentation.
{
"type": string,
"id": string,
"listen_port": int,
"location": {
"x": float,
"y": float,
"z": float
},
"rotation": {
"pitch": float,
"yaw": float,
"roll": float
},
"use_parent_component_attachment": bool,
"parent_component_attachment": string,
"use_attach_socket": bool,
"attach_socket": string
}
Configuration
- type: The values of type can be:
Camera,Lidar,IMU, etc. depending on what type of sensor being configured. - listen_port: The TCP or UDP port used by the simulator to transmit sensor data.
- location:: The location of the sensor in centimeters relative to the ego vehicle's origin to place a sensor.
- x: The x position
- y: The y position
- z: The z position
- rotation: The rotation of the sensor, in degrees, relative to the orientation of the ego vehicle.
- pitch: The pitch angle
- yaw: The yaw angle
- roll: The roll angle
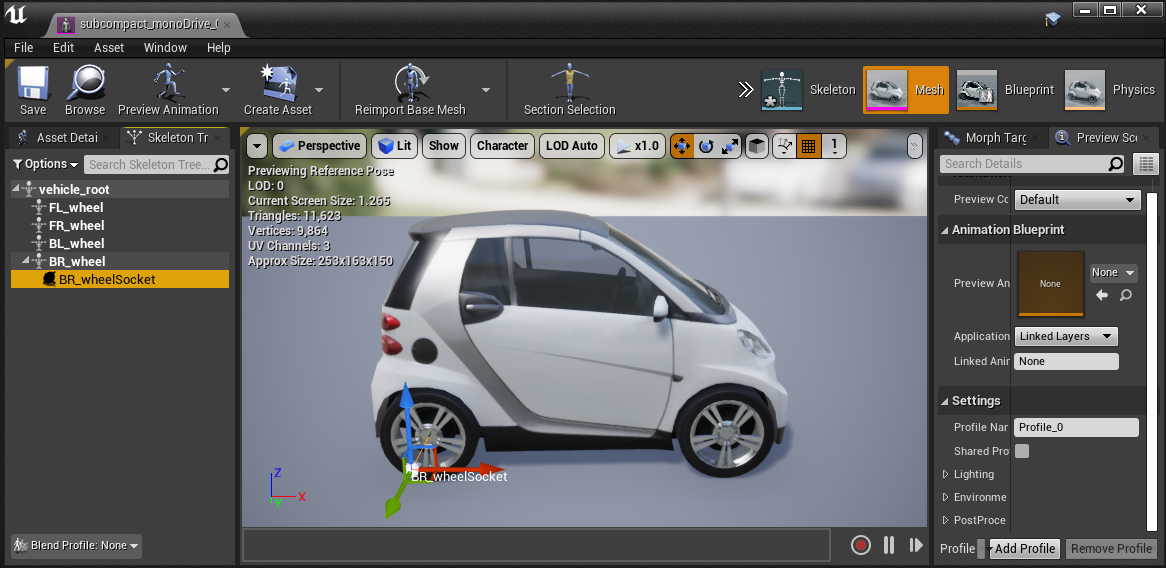
- Attachment Attaching the sensor allows you to place a sensor at the origin of a particular component, or on a socket defined by the skeletal or static mesh. This allows sensor placement to be preserved in .uasset's, and allows for placement and rotation to be defined in the editor. Note location and rotation above will transform the sensor relative to the socket/component, and may be undesirable if attachment is specified.
- use_parent_component_attachment Specifies whether we should attempt to attach the sensor to a particular component of the ego vehicle.
- parent_component_attachment String matching the component of the ego actor where we would like to attach the sensor.
- use_attach_socket Specifies whether we should attempt to attach the sensor to a particular socket subcomponent of the parent component.
- attach_socket String matching the name of the socket to which we would like to attach the sensor.
Output
{
"game_time": float,
"wall_time": int,
"sample_count": int
}
- game_time:: The "physics time" in seconds since the simualtion has started. This is the game time from Unreal Engine.
- wall_time: The wall clock, real-world time in UNIX epoch seconds.
- sample_count:: The number of samples that have been collected for this sensor.