Data Collection
Quick Start Guide
This guide helps users become familiar with the monoDrive Real-to-Virtual data collection process. The data collection needs to be conducted with the minimum:
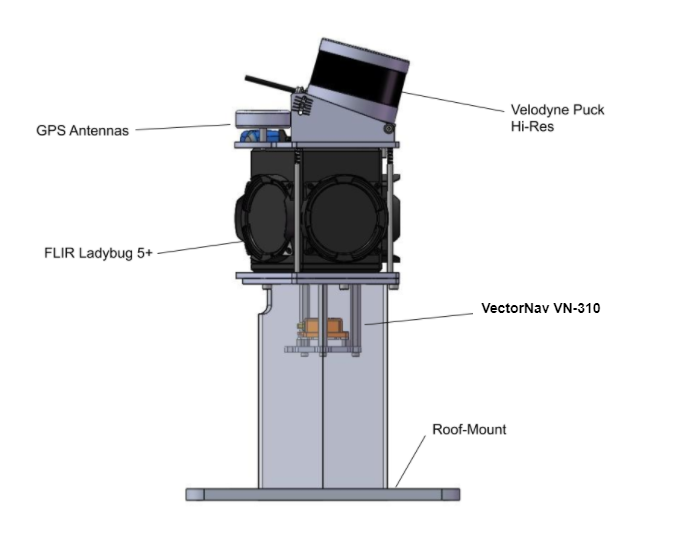
- LiDAR - Velodyne Puck Hi-Res or better
- Camera for scene generation - FLIR Blackfly
- Camera for dynamic actors - FLIR Ladybug 5+
- GNSS or GPS + IMU - VectorNav VN-310 or better
The monoDrive Real-to-Virtual hardware provides the proper sensor suite and transforms in a package that can be easily mounted to a roof mount:
Sensor Installation and Calibration
The Real-to-Virtual system requires that sensors be placed so they can collect high-resolution data of the road in front of the vehicle for scene generation. If dynamic actor detection is also required, a spherical camera sensor must be placed above the vehicle so all surroundings can be recorded.
Ladybug Calibration
For the monoDrive Real-to-Virtual hardware, the original spherical camera data must be calibrated for proper field-of-view prior to parsing in order to crop out the data collection vehicle. The original full size images show a good portion of the data collection vehicle:
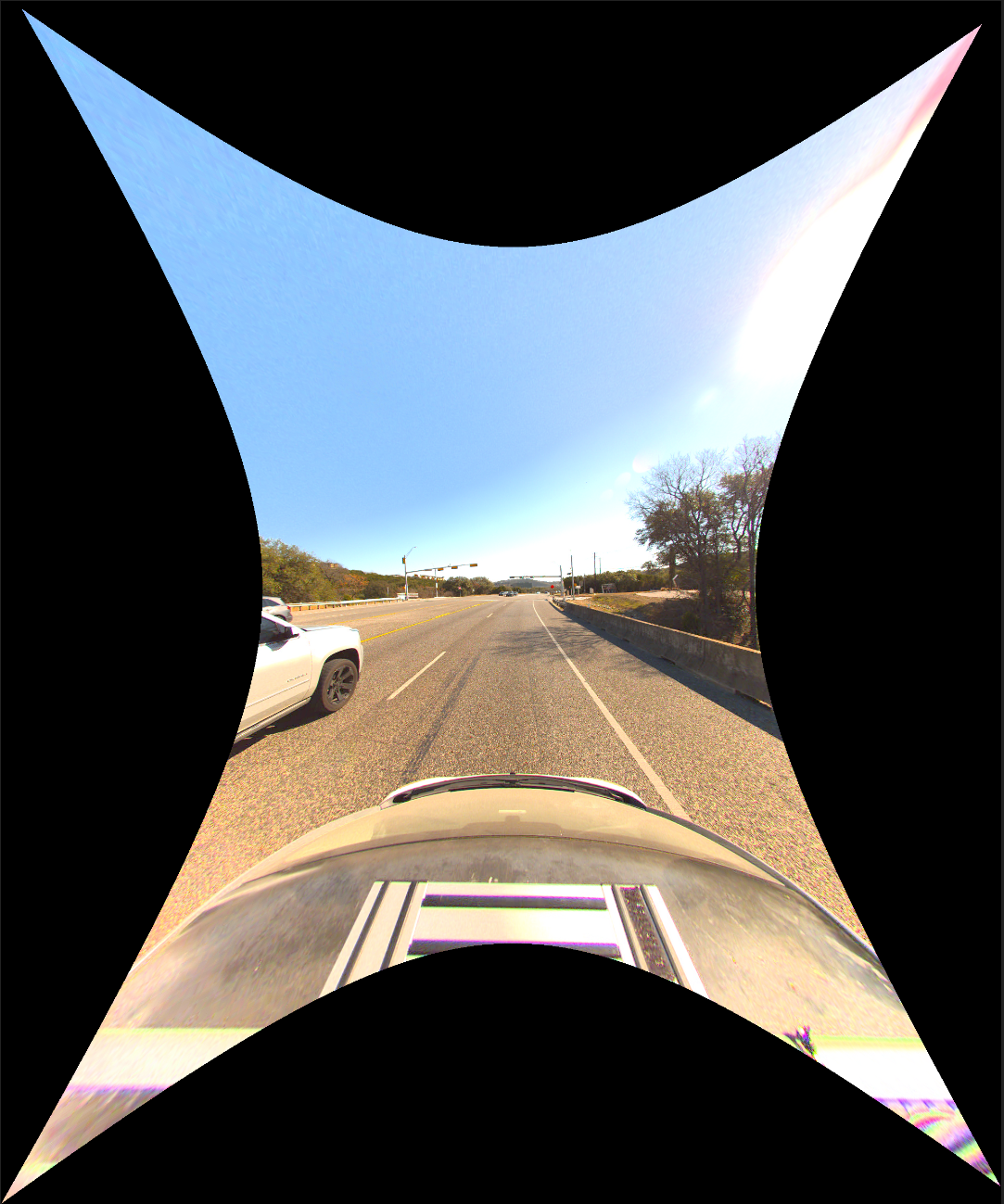
The data collection software provides a tool to determine the optimal field-of-view in both the horizontal and vertical dimensions.
After finding the optimal field-of-view angles, the values should be entered into the "Ladybug Configuration" section of the "Configuration" tab. For the monoDrive vehicle the JSON should look like:
[
{
"type": "Ladybug",
"location": {
"x": 0,
"y": 0,
"z": 0
},
"rotation": {
"pitch":0.0,
"yaw":0.0,
"roll":0.0
},
"desired_hfov": 90.0,
"desired_vfov": 62.0
}
]
When parsed, the above settings turn the image into a cropped version:

GNSS Calibration
In order to achieve an accurate heading from the VectorNav VN-310, the device needs to run for a few minutes in order to achieve a sufficient navigation lock. For the monoDrive Real-to-Virtual hardware kit, this means plugging in the sensor kit and driving around for a few minutes prior to recording. See the VectorNav Documentation for more info on ensuring the device is properly locked.
Data Collection
To collect data:
- Ensure that the JSON configurations are correct in the "Configure" tab.
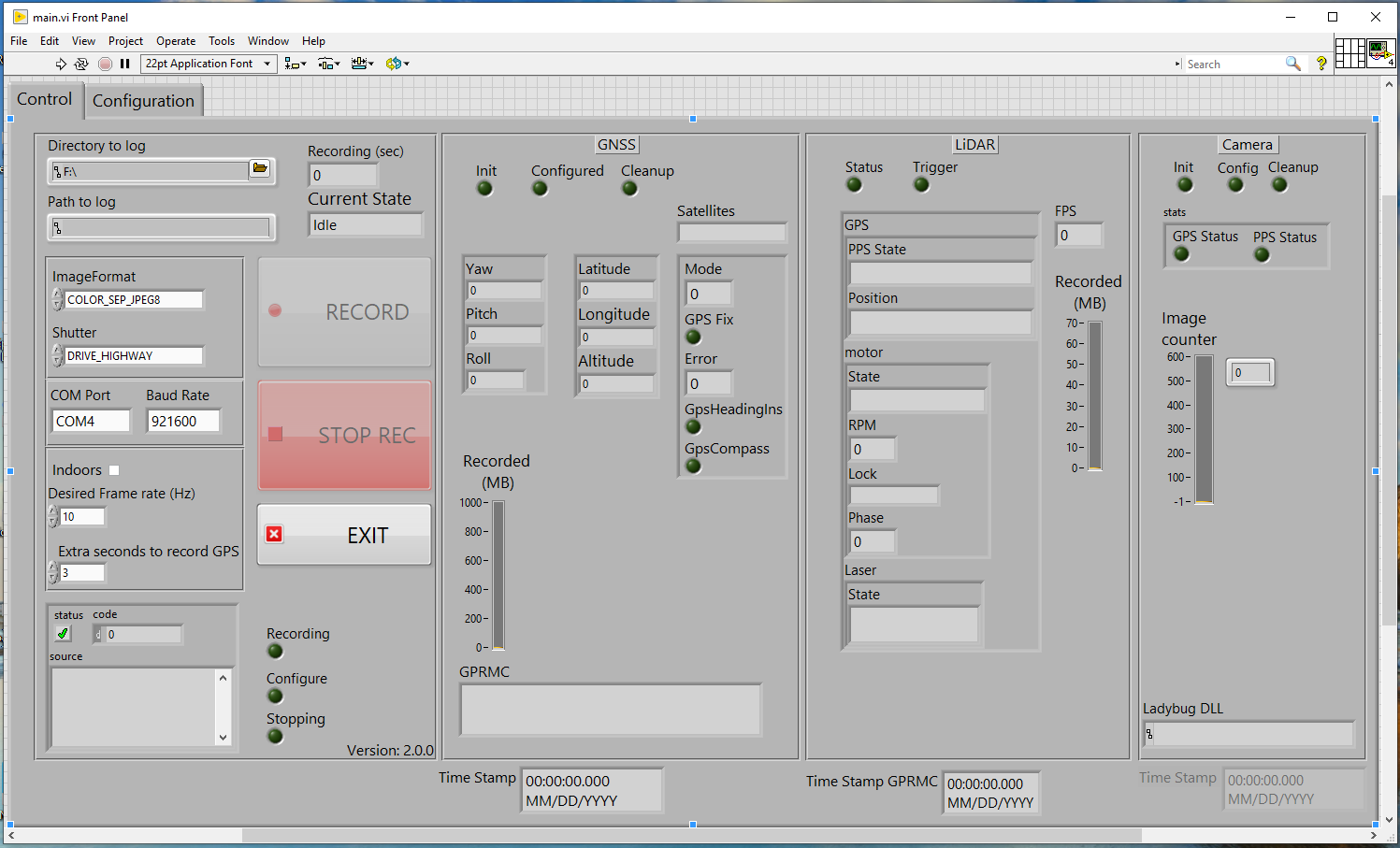
- With the "Control" tab selected, click the "Run" arrow on the top-left of the monoDrive LabVIEW data logger application. The data logger will connect to all sensors and ensure they are functioning as expected.
- The software is now connected and can display sensor outputs. To begin recording data, click "Record".
- When data collection is complete, click "Stop Rec".
- When you are done collecting data, click "Exit" to properly shut down all the sensor connections.
Driving Tips
The monoDrive Real-to-Virtual data processing works best for certain driving conditions. In order to get the best results during data collection:
- Drive the vehicle between 15 and 50 miles per hour
- Avoid taking sharp or fast turns
- If possible avoid stopping the vehicle for long periods of time
- The less traffic around during collection, the better the output of the scene generation will be
- Try to limit data collection to a few minutes. While long runs will work, shorter and more frequent data collection will make processing easier
Verifying Data Collection Output
Several data stream files will be saved by the monoDrive Real-to-Virtual data logger. By default the logger will save data in the folder specified in the UI in subfolders that match the year, date, and time by hour. To verify that a run was successful:
- Ensure that all streams are present in the output
binarydirectory:- Configuration files:
configuration_vectornav.txt,configuration_ladybug.txt,configuration_lidar.txt - LiDAR data:
lidar.bin - GNSS data:
vectornav.bin - Ladybug Data:
streams-000000.pgr - Timestamp data:
timestamps_lidar.txt,timestamps_trigger.txt
- Configuration files:
Parsing Data Into KITTI Format
For use in the monoDrive Real-to-Virtual data processing pipeline, the collected
data needs to be converted to the
KITTI format. The
monodrive_to_kitti.py script in the monoDrive Mapping Toolkit allows users
to parse the collected binary data into KITTI:
$ conda activate mapping_toolkit
(mapping_toolkit)
$ python monodrive_to_kitti.py --input /path/to/data/binary --output /path/to/data/kitti --crop
When complete, the data will be moved to the kitti directory under the same
data collection directory.