Camera
A monoDrive Camera Sensor can support six different image types:
- RGB: A three channel image of the scene
- Grayscale: A single channel grayscale image of the scene
- Semantic Segmentation: Each object in the scene is semantically labeled by color
- Depth camera: Provides a camera array where pixel values represent distance from the camera
- Fisheye: Poly2FisheyeCamera is either Equidistant or Scaramuzza model Fisheye camera based.
- 360 Camera: Provides a 360 view of the scene.
Image output size, intrinsic camera parameters, and various other settings can be controlled through each camera's configuration.
RGB Camera
Provides a RGBA camera stream with optional bounding boxes for dynamic objects in the scene.

{
"type": "Camera",
"listen_port": 8010,
"location": {
"x": 0.0,
"y": 0.0,
"z": 250.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
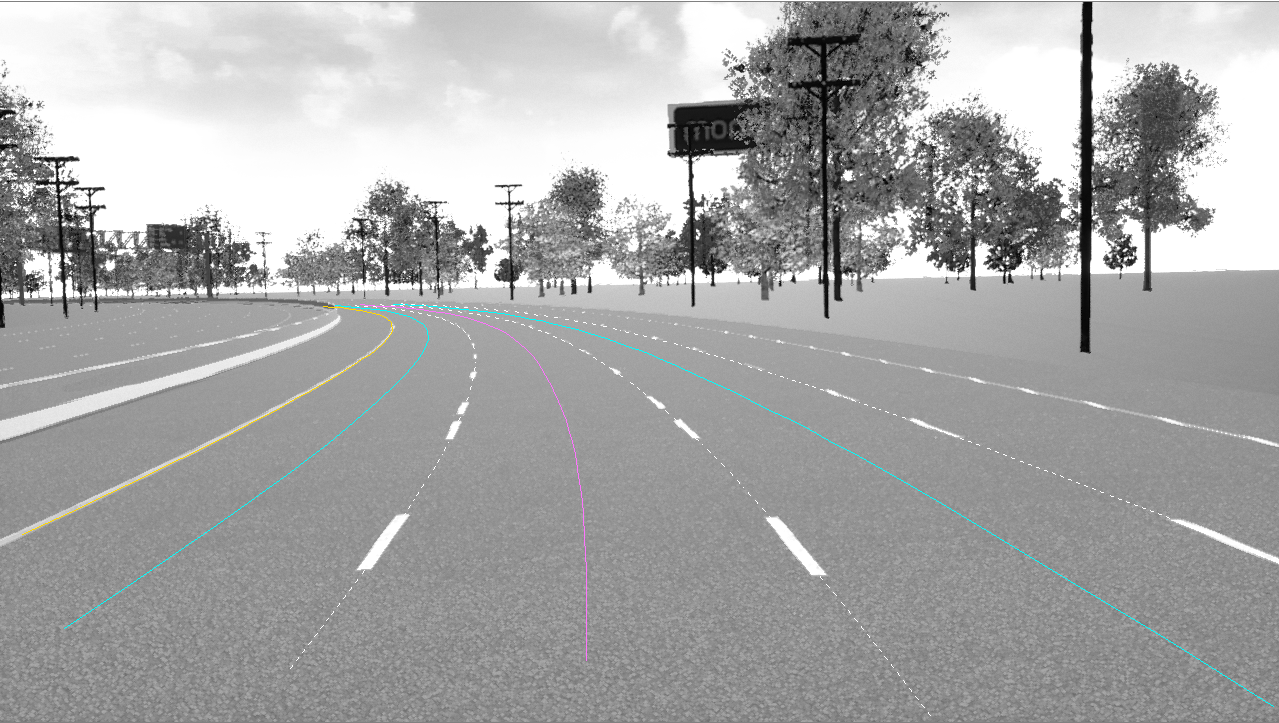
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"camera_matrix": [
[443.0, 0.0, 256.0],
[0.0, 443.0, 256.0],
[0.0, 0.0, 1.0]
],
"channel_depth": 1,
"channels": "bgra",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"dynamic_range": 1.0,
"exposure_compensation": -1.0,
"fov": 60.0,
"image_noise_bias": 0.0,
"min_shutter": 0.0005000000237487257,
"max_shutter": 0.00139999995008111,
"motion_blur_bias": 0.10000000149011612,
"white_balance": 0.0,
"white_balance_temp_offset": 0.0,
"ray_tracing": {
"enable_ray_tracing": false
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 32,
"y": 32
},
"window_size": {
"x": 0,
"y": 0
}
}
}
- stream_dimensions: The size of the image in pixels.
- x: The width of the image in pixels.
- y: The height of the image in pixels.
- annotation:
- cull_partial_frame: If
true, the actors that are only partially in frame will be removed from annotations. - cull_partial_frame_min: Sets a border of pixels inside the image to cull.
- debug_draw: If
trueandannotationistrue, the bounding boxes will be displayed in the image for annotated objects. - desired_tags: If this array is not empty, the only actors with the tags specified here will be included in annotations.
- far_plane: The maximum distance in centimeters to annotate actors in the scene.
- include_annotation: If
true, the annotation information will be provided in the output data. - include_lanes: If
true, lane information will be included in the annotation. - include_obb: If
true, the actor oriented bounding box information will be included in annotations. - include_tags: If
true, the actor tag information will be included in annotations. - lane_sampling_distance: Distance (cm) along the lane we want included in the annotation.
- lane_sampling_frequency: Interval (cm) along the lane we want to sample annotation points.
- lane_subsampling: Interval (pixels) between points in image space we want to actually be returned.
- cull_partial_frame: If
- camera_matrix: Camera projection matrix used for computing field-of-view.
- channel_depth: Sets the total number of channels that will be in the output.
- channels: Used to determine type of image output. For RGB cameras, this should always be
rgbaand for grayscale this should begray. - color_filter_array: color filter array (bayer)
- cfa: The cfa type. Can be any 4 length string consisting of the letters
rgbc. - use_cfa: If
use_cfaset totrue, enables color filter array.
- cfa: The cfa type. Can be any 4 length string consisting of the letters
- dynamic_range: Controls the contrast of the image.
- exposure_compensation: Control of the ISO value in the image via the exposure scale (moves gray point of the image and controls brightness).
- fov: Controls the horizontal angle of view of the camera. The vertical angle will be dynamically calculated based on
stream_dimensions. If set to0then the camera matrix will be used to compute the field-of-view. - image_noise_bias: Direct control over gaussian noise in image data.
- min_shutter: Lower bound of the camera's exposure time in seconds. Higher values will have more motion blur.
- max_shutter: Upper bound of the camera's exposure time in seconds. Higher values will have more motion blur.
- motion_blur_bias: Allows direct control over motion blur amount.
- white_balance: Controls the cyan/magenta balance.
- white_balance_temp_offset: A base temperature of 6500K can now be offset to be warmer or colder.
- ray_tracing: ray tracing
- ray_tracing_enable: If set to
true, enables ray tracing.
- ray_tracing_enable: If set to
- viewport: Multi-Viewport Camera Information
- enable_viewport: If
true, will enable camera viewport. - enable_hud: If
true, will enable HUD (Heads Up Display). - hud_class_path: Path to HUD Blueprint.
- monitor_name: If specified, will position viewport on specific monitor by name.
- monitor_number: If specified, will position viewport on specific monitor by index. Note that if
monitor_nameis also specified, this index will be within the matching group of monitors. - fullscreen: If
true, the camera viewport will be set to borderless fullscreen. - window_offset: The viewport window offset from top-left of monitor. This only applies if
fullscreenisfalse.- x: The window offset in x.
- y: The window offset in y.
- enable_viewport: If
Grayscale Camera
Provides a grayscale camera stream with optional bounding boxes for dynamic objects in the scene.

{
"type": "Camera",
"listen_port": 8012,
"location": {
"x": 0.0,
"y": 0.0,
"z": 250.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"camera_matrix": [
[443.0, 0.0, 256.0],
[0.0, 443.0, 256.0],
[0.0, 0.0, 1.0]
],
"channel_depth": 1,
"channels": "gray",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"dynamic_range": 1.0,
"exposure_compensation": -1.0,
"fov": 60.0,
"image_noise_bias": 0.0,
"min_shutter": 0.0005000000237487257,
"max_shutter": 0.00139999995008111,
"motion_blur_bias": 0.10000000149011612,
"white_balance": 0.0,
"white_balance_temp_offset": 0.0,
"ray_tracing": {
"enable_ray_tracing": false
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 32,
"y": 32
},
"window_size": {
"x": 0,
"y": 0
}
}
}
All values are the same as the RGB camera except:
- channels: Used to determine the type of image output. For grayscale cameras, this should always be
gray.
Semantic Camera
Provides a grayscale camera stream where pixel values represent the semantic category of the rendered actor.

{
"type": "SemanticCamera",
"listen_port": 8013,
"location": {
"x": 0.0,
"y": 0.0,
"z": 250.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"camera_matrix": [
[443.0, 0.0, 256.0],
[0.0, 443.0, 256.0],
[0.0, 0.0, 1.0]
],
"channel_depth": 1,
"channels": "gray",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"dynamic_range": 1.0,
"exposure_compensation": -1.0,
"fov": 60.0,
"image_noise_bias": 0.0,
"min_shutter": 0.0005000000237487257,
"max_shutter": 0.00139999995008111,
"motion_blur_bias": 0.10000000149011612,
"white_balance": 0.0,
"white_balance_temp_offset": 0.0,
"ray_tracing": {
"enable_ray_tracing": false
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 0,
"y": 0
},
"window_size": {
"x": 0,
"y": 0
}
}
}
The configuration values are the same as RGB. The following table shows the semantic definition for each pixel value:
| Asset | Grayscale Pixel Value |
|---|---|
| ego vehicle | 2 |
| car | 3 |
| motorcycle | 4 |
| bus | 6 |
| truck | 8 |
| fence/guardrail | 5 |
| traffic light | 10 |
| person | 11 |
| bicycle | 12 |
| building (shipping containers) | 15 |
| traffic signs | 20 |
| lane markers | 70 |
| terrain | 80 |
| foliage | 85 |
| gravel | 100 |
| power lines | 110 |
| pylons | 115 |
| sky | 141 |
| street light/pole | 153 |
| road | 175 |
| sidewalk | 190 |
| road art | 193 |
Depth Camera
Provides an unsigned 32-bit floating point array where the pixel values represent the distance from the camera in centimeters.

{
"type": "DepthCamera",
"listen_port": 8014,
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"camera_matrix": [
[443.0,0.0, 256.0],
[0.0,443.0, 256.0],
[0.0,0.0, 1.0]
],
"channel_depth": 4,
"channels": "gray",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"description": "",
"dynamic_range": 1.0,
"enable_streaming": true,
"exposure_compensation": -1.0,
"fov": 0.0,
"image_noise_bias": 0.0,
"location": {
"x": 0.0,
"y": 0.0,
"z": 250.0
},
"max_distance": 50000.0,
"max_shutter": 0.00139999995008111,
"min_shutter": 0.0005000000237487257,
"motion_blur_bias": 0.10000000149011612,
"ray_tracing": {
"enable_ray_tracing": false
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 0,
"y": 0
},
"window_size": {
"x": 0,
"y": 0
}
},
"white_balance": 0.0,
"white_balance_temp_offset": 0.0
}
These configuration values are the same as the RGB camera. Note that the output
format of the image is an array the same size as stream_dimensions containing
32-bit floating point numbers representing depth in centimeters.
Fisheye and Wide Angle Camera
Scaramuzza based Fisheye Camera
This model is defined by a polynomial (Scaramuzza’s model a0, a2, a3, a4) which describes the projection onto the image sensor. If you wish to use an idealized or Equidistant fisheye model set use_calibrated_parameters to false. The Poly2 model can generically describe any camera lens projection but is best used for difficult models such as fisheye and ultra wide angle lenses. The polynomial parameters can be calibrated automatically from a chessboard dataset using mathwork’s toolbox.

{
"type": "Poly2FisheyeCamera",
"listen_port": 8018,
"a0": -350.0,
"a2": -0.0001,
"a3": 1.2e-06,
"a4": -1.5e-09,
"b0": 1.0,
"b1": 0.0,
"b2": 0.0,
"b3": 0.0,
"cx": 0.0,
"cy": 0.0,
"stretch_matrix_cde": {
"x": 1.0,
"y": 0.0,
"z": 0.0
},
"exposure": 1,
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"channel_depth": 4,
"channels": "bgra",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"description": "",
"dynamic_range": 1.0,
"enable_streaming": true,
"exposure_compensation": -1.0,
"face_size": 512,
"fov": 180.0,
"image_noise_bias": 0.0,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"max_distance": 50000.0,
"max_shutter": 0.00139999995008111,
"min_shutter": 0.0005000000237487257,
"motion_blur_bias": 0.10000000149011612,
"ray_tracing": {
"enable_ray_tracing": false
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 0,
"y": 0
},
"window_size": {
"x": 0,
"y": 0
}
},
"white_balance": 0.0,
"white_balance_temp_offset": 0.0
The configuration for a Equidistant Fisheye Camera requires some additional settings.
- vignette_bias: Before the hard mechanical vignette at what point should the fade start normalized with respect to the diameter of the fisheye.
- vignette_radius_start: in the transition to black at the start of the mechanical vignette start with this value of black before the linear fade.
- fisheye_pixel_diameter: To obtain a bounded fisheye set the pixel diameter to the smallest axis, or to the measured real pixel diameter limit from the image. To obtain a diagonal bounded fisheye set the pixel diameter to the hypotenuse of the image. To obtain a fisheye that is greater than the image plane use the value from your model
- face_size: Increasing this number improves image quality and vice versa with diminishing returns with respect to the image resolution. face_size should be smaller than the largest resolution.
360 Camera
Provides a 360 view of the scene.
{
"type":"Camera360",
"listen_port": 8017,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"stream_dimensions": {
"x": 512,
"y": 512
},
"annotation": {
"cull_partial_frame": false,
"cull_partial_frame_min": 1.0,
"debug_draw": false,
"desired_tags": [
"traffic_sign", "vehicle"
],
"far_plane": 10000.0,
"include_annotation": false,
"include_lanes": true,
"include_obb": false,
"include_tags": true,
"lane_sampling_distance": 10000.0,
"lane_sampling_frequency": 100.0,
"lane_subsampling": 10.0
},
"camera_matrix": [
[443.0, 0.0, 256.0],
[0.0, 443.0, 256.0],
[0.0, 0.0, 1.0]
],
"channel_depth": 1,
"channels": "bgra",
"color_filter_array": {
"cfa": "rccc",
"use_cfa": false
},
"dynamic_range": 1.0,
"exposure_compensation": -1.0,
"fov": 60.0,
"image_noise_bias": 0.0,
"min_shutter": 0.0005000000237487257,
"max_shutter": 0.00139999995008111,
"motion_blur_bias": 0.10000000149011612,
"white_balance": 0.0,
"white_balance_temp_offset": 0.0,
"ray_tracing": {
"enable_ray_tracing": false
},
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 0,
"y": 0
},
"window_size": {
"x": 0,
"y": 0
}
}
}
Raw Output
The total sensor output will be 12 bytes for the monoDrive sensor header plus the total number of bytes for the image defined as:
Stream Dimension Width (x) * Stream Dimension Height (y) * 4
for RGB images and
Stream Dimension Width (x) * Stream Dimension Height (y)
for grayscale images. See the "Depth Camera" description for information about the output format for this sensor.
Annotation
{
"actors": [{
"2d_bounding_boxes": [{
"2d_bounding_box": [
158.12020874023438,
191.5050811767578,
261.953125,
272.0334167480469
],
"name": "Body"
}],
"name": "sedan_monoDrive_02_HD4_128",
"oriented_bounding_box": [{
"center": [
7072.78662109375,
-1290.6829833984375,
-172.56475830078125
],
"extents": [
509.5,
184.18313598632812,
148.64846801757812
],
"name": "Body",
"orientation": [
-2.768632839433849e-06,
-0.00046827553887851536,
-0.9241809248924255,
0.381954550743103
],
"scale": [
1.0,
1.0,
1.0
]
}],
"tags": [
"vehicle",
"static",
"car"
]
},
{
"2d_bounding_boxes": [{
"2d_bounding_box": [
189.89840698242188,
203.3860321044922,
260.5026550292969,
267.6765441894531
],
"name": "Body"
}],
"name": "subcompact_monoDrive_01_HD_32",
"oriented_bounding_box": [{
"center": [
9515.275390625,
-1273.10546875,
-172.4475555419922
],
"extents": [
253.14500427246094,
144.71368408203125,
148.70858764648438
],
"name": "Body",
"orientation": [
8.400806109420955e-06,
-0.0004682083672378212,
-0.9330278635025024,
0.3598036468029022
],
"scale": [
1.0,
1.0,
1.0
]
}],
"tags": [
"vehicle",
"static",
"car"
]
}
],
"lanes": [{
"center": [{
"x": 255.92514038085938,
"y": 477.407958984375
}, {
"x": 255.9377899169922,
"y": 440.50653076171875
}],
"left": [{
"x": 109.17768859863281,
"y": 477.3799743652344
}, {
"x": 133.64822387695313,
"y": 440.4832458496094
}],
"right": [{
"x": 402.6728515625,
"y": 477.435791015625
}, {
"x": 378.22747802734375,
"y": 440.52972412109375
}],
"road_id": 0,
"lane_id": 3,
"s": 5162.6796875,
"offset": 0
}]
}
Annotation data comes in an additional JSON message on the same port as the camera image data. Each element in the JSON array represents a single annotation for a dynamic actor.
-
actors: Array JSON objects that describe the actors on the camera frame
- 2d_bounding_boxes: Array of JSON bounding boxes for an actor
- 2d_bounding_box: Array containing the top-left x, top-left y, bottom-right x, bottom-right y coordinates in the image plane for the bounding box of this actor's section
- name: The name of the actor's section this bounding box surrounds
- name: The name of the actor for these bounding boxes
- oriented_bounding_box: An array containing JSON for each 3D bounding box for the actor's sections
- center: The x, y, and z center of the bounding box in centimeters with respect to the camera.
- extents: The x, y, and z radius in centimeters from the center of the bounding box
- name: The name of the actor's section this bounding box surrounds
- orientation: The rotation of the bounding box about the center as a quaternion
- scale: The scale coefficients for this bounding box
- tags: An array of tags assigned to this actor
- 2d_bounding_boxes: Array of JSON bounding boxes for an actor
-
lanes: Array JSON objects that describe the lanes on the camera frame
- road_id: opendrive spec road id, can be used to lookup this lane in the opendrive map.
- lane_id: opendrive lane id, can be be used to identify this lane in the opendrive map.
- s: distance along opendrive lane spline.
- offset: an array of (x,y) points in image space for the left lane marking.
- left: an array of (x,y) points in image space for the left lane marking.
- right: an array of (x,y) points in image space for the right lane marking.
- center an array of (x,y) points in image space for the lane center.
Camera Coordinate Reference System
A Camera's coordinate reference system is used in relation to Unreal Engine.

Color Filter Arrays (Bayer)
Real cameras generate RAW images before demosaicing (debayering) into RGB. The monoDrive simulator is able to generate RAW images with any red, green, blue, and clear 2x2 filter pattern at runtime in the monoDrive client API. The demosaicing process on real cameras introduces several different artifacts that your perception system has been trained with and from real camera images.
To enable color filter, set use_cfa to true, and select a cfa type such as "rccc" or any combination of r, g, b, or c.
"color_filter_array": {
"use_cfa": true,
"cfa":"rccc"
}
Camera as a Viewport Camera
The user can configure a viewport on any standard, fisheye, or 360 camera. This will open an additional window on the simulation machine to directly display the stream of camera data.
"viewport": {
"enable_hud": false,
"enable_viewport": false,
"fullscreen": false,
"hud_class_path": "WidgetBlueprint'/Game/HUD/VehicleHUD.VehicleHUD_C'",
"monitor_name": "",
"monitor_number": 0,
"window_offset": {
"x": 32,
"y": 32
},
"window_size": {
"x": 0,
"y": 0
}
}
More information can be found on Multi-Viewport Page
Real-Time Ray Tracing Tuning
The maps available out of the box in monoDrive have been better tuned for Real-Time Ray Tracing. Real-Time Ray Tracing allows for accurate real-time reflections, better dynamic shadows, and ambient occlusion at the cost of frame rate on lower end machines. The primary viewport also defaults to ray tracing disabled but can be enabled by selecting the post processing volume in the map of interest and turning on ray traced ambient occlusion and ray traced reflections.
For better performance, the camera sensors default to ray_tracing_enable: false, but ray_tracing_enable: true can be set or added in the configuration at runtime to enable real time ray tracing.



Camera Configuration Examples
Cull Partial Frame

Field Of View Example

Far Plane Example
