Waypoint
The waypoint sensor returns a JSON string with information on the waypoints behind and in front of all vehicles in the scenario. Information for the vehicle's current lane, left lane, and right lane are included.
Configuration
{
"type": "Waypoint",
"listen_port": 8556,
"debug_tags": ["ego"],
"distance": 1000.0,
"frequency": 100.0,
"draw_debug": true
}
- distance : Distance in centimters to generate waypoints from the vehicle's position.
- frequency : Distance in centimeters that specifies the spacing between waypoints.
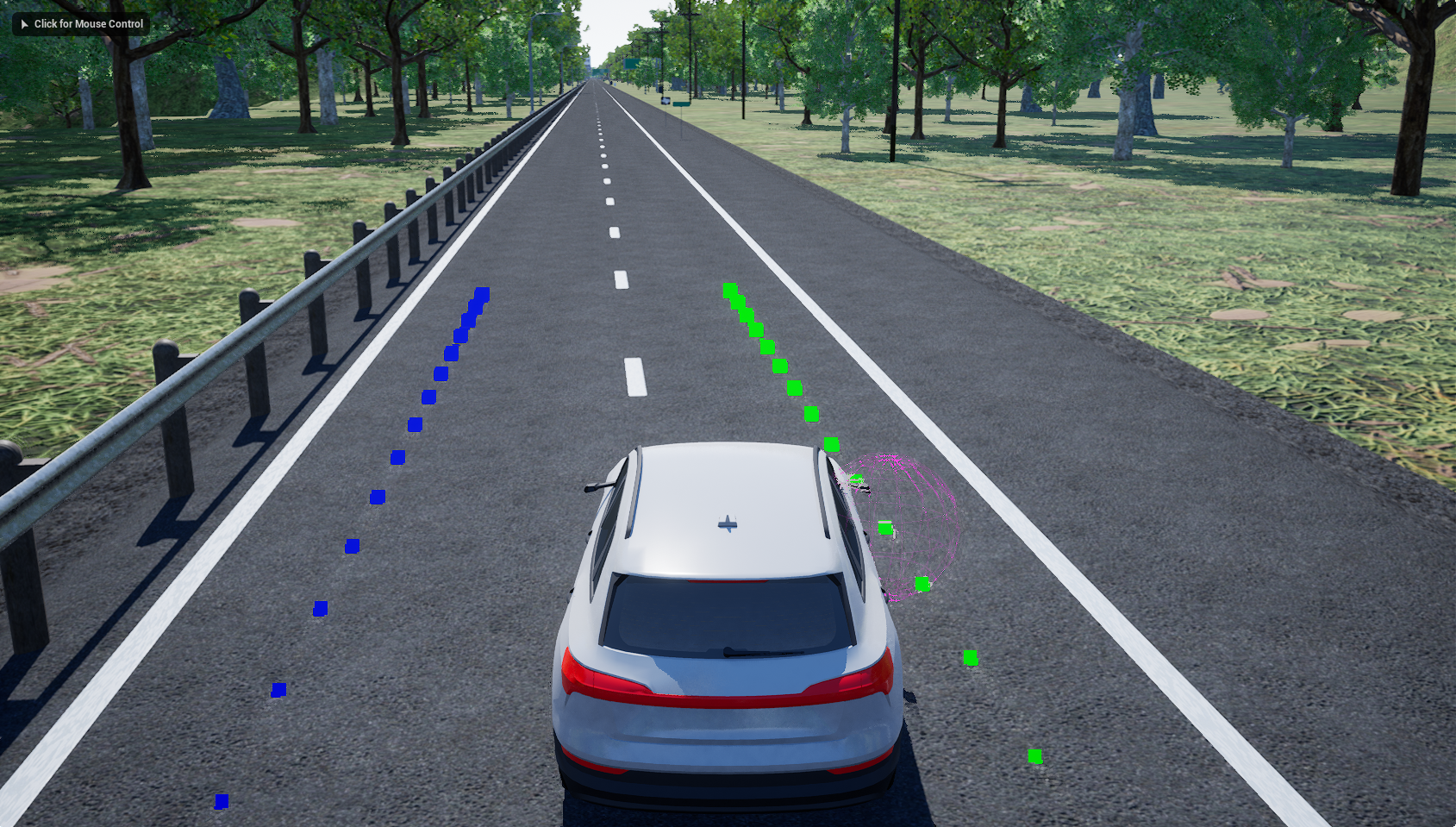
- draw_debug : Set to "true" to visualize the waypoints during simulation.
- debug_tags: If
draw_debugis true, the waypoints will be drawn only for the vehicles that contain the same tags specified here.