GPS
The GPS coordinates are based on the GPS anchor set for the current map. The location and orientation are relative to the ego vehicle's origin.
Configuration
{
"type": "GPS",
"listen_port": 8100,
"location": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": {
"pitch": 0.0,
"roll": 0.0,
"yaw": 0.0
},
"anchor_overrides": {
"gis_anchor": {
"x": 0.0,
"y": 0.0,
"z": 0.0
},
"rotation": -90.0,
"use_override": false,
"world_anchor": {
"x": -97.7431,
"y": 30.2672,
"z": 0.0
}
},
"description": ""
}
- anchor_overrides:
- use_override: if set to true use these override values, if false the gis_anchor actor placed in the map will be used, if there is no gis_anchor actor and this is set to false then the Center of Austin Texas will be used at your maps coordinate center.
- gis_anchor: (longitude, latitude, height) positioned at the world anchor
- rotation: the north direction for heading rotated counter clockwise with respect to the X vector of the map
- world_anchor: the position in the simulation map where the gis_anchor originates
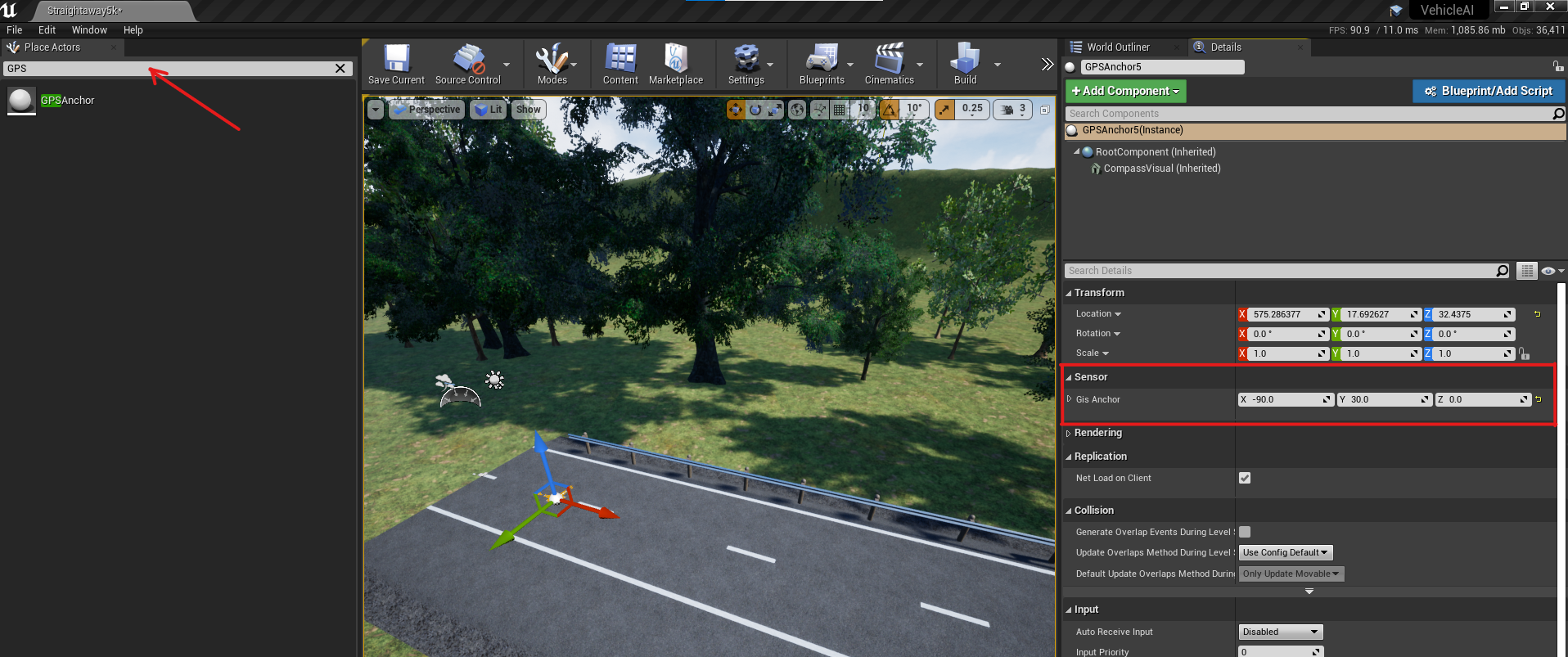
Adding a GPSAnchor to a map
- On the search box of the
Place Actorswindow, look forGPSAnchor. - Drag and drop to the map at the desired location.
- On the
Detailswindows, modify thexfor longitude andyfor latitude, as desired.
Output
The total sensor output is 92 bytes, where the first 16 bytes correspond to the monoDrive sensor header and the remaining 76 conform the GPS information. Below is a table of each element in the message:
| Type | Name | Units | Description |
|---|---|---|---|
| Float | Latitude | Degrees | Latitude on the map with respect to the GIS anchor |
| Float | Longitude | Degrees | Longitude on the map with respect to the GIS anchor |
| Float | Elevation | Meters | Elevation on the map with respect to the GIS anchor |
| Float | World Location x | Cemtimeter | Coordinate in the y direction with respect to the world |
| Float | World Location y | Cemtimeter | Coordinate in the x direction with respect to the world |
| Float | Forward x | X componet of the GPS anchor unit vector | |
| Float | Forward y | Y componet of the GPS anchor unit vector | |
| Float | Forward z | Z componet of the GPS anchor unit vector | |
| Float | Ego yaw | Degrees | Compass heading of the ego vehicle |
| Float | Ego speed | Meters per second | Speed of the ego vehicle |
| U16 | horizontal accuracy | Meters | Horizontal accuracy of the GPS |
| U16 | vertical accuracy | Meters | Vertical accuracy of the GPS |
| U8 | Number of satellites | Number of satellites used for signal | |
| U8 | Mode | Fixed mode status | |
| U16 | CRC |