mono_send_fixed_step_command.vi
Description
Sends a set of commands to the monoDrive Simulator to control the movement of ego vehicle.
- ClosedLoopStepCommand_ID
- SampleSensorsCommand_ID
- EgoControl_ID
For technical support contact us at monodrive.support@ni.com
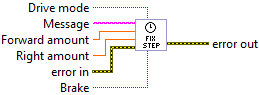
Inputs
-
Right amount: Value between -1.0 and 1.0 that determines the steering position (-1 is left, +1 is right)
-
Forward amount: Value between -1.0 and 1.0 that determines the amount of throttle to apply
-
Brake: True to make the car stop.
-
Drive mode: False to drive the car forward
-
Message: Send a message with the specified time step to run the simulation
-
error in (Error Cluster): Accepts error information wired from previously called VIs. This information can be used to decide if any functionality should be bypassed in the event of errors from other VIs.
Outputs
- error out (Error Cluster): Accepts error information wired from previously called VIs. This information can be used to decide if any functionality should be bypassed in the event of errors from other VIs.