C++ Quick Start
The monoDrive C++ Client is Open Source Software for connecting to and configuring the monoDrive Simulator and Scenario Editor. To get started contact the NI monoDrive Team.
Setup
The monoDrive C++ Client is cross-platform and tested on both Windows 10 and Ubuntu 18.04.
Windows
Windows Prerequisites
- Windows 10
- Visual Studio 2019 Community Edition
- VSCode
Windows Library Dependencies
NOTE: Extract or install these libraries to C:\local so cmake can find them.
- Boost
- Add
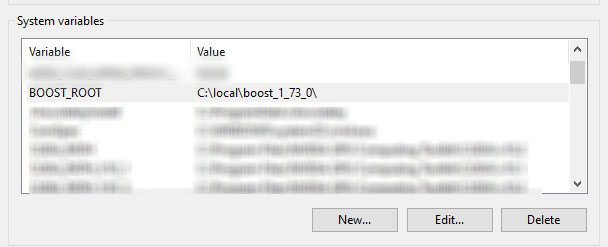
C:\local\boost_1_73_0\lib64-msvc-14.2to your PATH variable - Create the
BOOST_ROOTenvironment variable and set it toC:\local\boost_1_73_0\
- CMake
- When installing, make sure to choose the option to add CMake to your Windows Path variable.
To build the examples the following are required:
-
OpenCV Extract to
C:\local\opencvand addC:\local\opencv\build\x64\vc15\binto your PATH environment variable. -
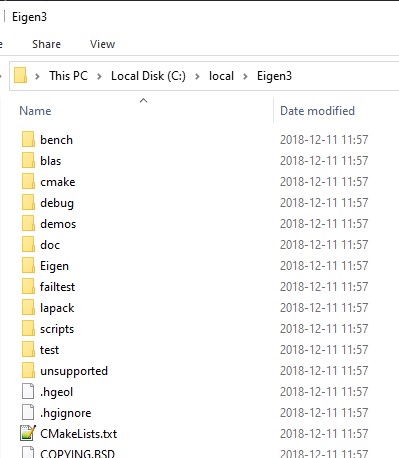
Eigen Extract to
C:\local\Eigen3and addC:\local\Eigen3to your PATH environment variable.- NOTE: You will need to move the extracted contents out of the version subfolder (eg
.\eigen-3.3.7\) into the parent directory, such thatC:\local\Eigen3\Eigenis a valid directory path.
- NOTE: You will need to move the extracted contents out of the version subfolder (eg
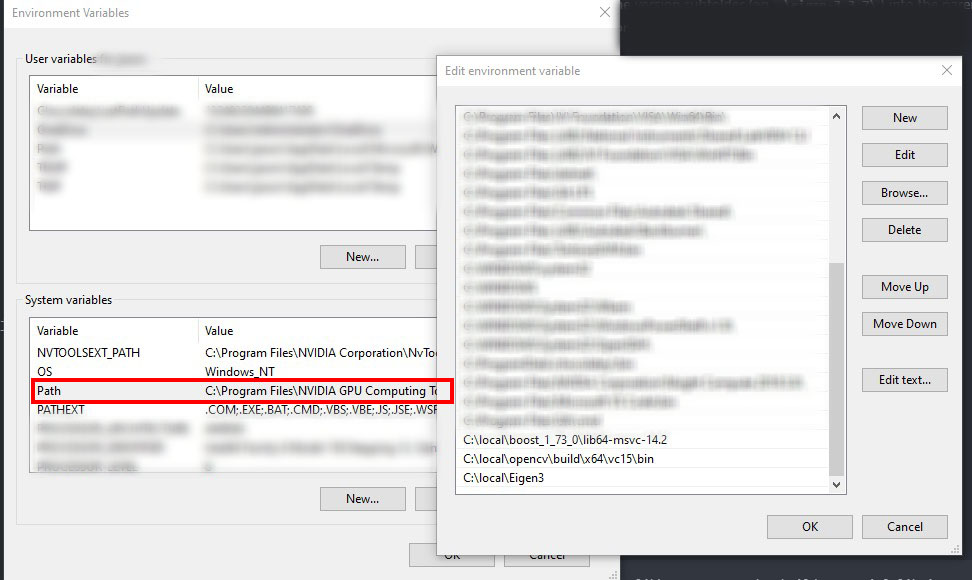
Environment Variables
Ubuntu
Ubuntu 18.04 Prerequisites
- Ubuntu 18.04
- Run the prerequisite setup script from the root repository directory. This will install all dependencies and also build a newer version of Boost:
$ ./util/setup.sh
Ubuntu 20.04 Prerequisites
- Ubuntu 20.04
- Install packages:
$ sudo apt-get update && sudo apt-get install libboost-dev libboost-system-dev libboost-filesystem-dev build-essential libeigen3-dev
Installation with Bazel
You can include the monoDrive Simulator client in your existing Bazel project
by adding the following lines to your WORKSPACE file
local_repository(
name = "monodrive",
path = "path/to/monodrive-client"
)
and the following to your BUILD files as needed
cc_library(
name = "my_lib",
srcs = [...],
hdrs = [...],
deps = [
...,
"@monodrive//monodrive/core:monodrive"
]
)
Installation to system for Bazel & Ubuntu
You can build and install the monoDrive Simulator client to your Ubuntu system using CMake
mkdir build
cd build
cmake ..
make
sudo make install
This will install the client library under the prefix /usr/local/monodrive/client.
It can now be included or linked as needed.
For example, to compile your own executable with the monoDrive client library
g++ main.cpp -I/usr/local/monodrive/client/include/ -L/usr/local/monodrive/client/lib -lboost_system -lmonodrive -o my_program
Make library available for dynamic loading
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/usr/local/monodrive/client/lib
Finally run
./my_program
Setup from Command Line
Configure
To configure the CMake project, navigate to the project root, and run:
mkdir build
cd build
cmake ..
Build
To build the core libraries and examples, from ./build, run:
Windows
cmake --build .
Linux
make
Run
To run an example, navigate back to the project root, and run:
Windows
./build/examples/cpp/lane_follower/Release/real_time.exe
Linux
./build/examples/cpp/lane_follower/real_time
Setup using VSCode
Build
-
Install and launch VSCode.
-
Add the following VSCode extensions:
-
Select
File -> Open Folderand navigate to this folder to build the cpp-examples or simulator-cpp-client to build just the client library. -
Use the CMake extension to configure and build
- Click the Configure All Projects icon:
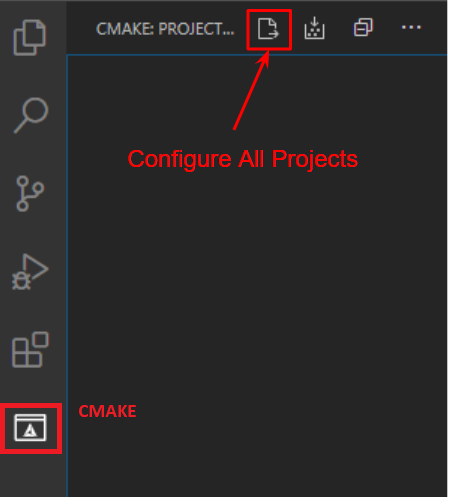
-
If prompted to Scan for Kits select Yes.
Windows: Use
Visual Studio Community 2019 Release - amd64.Linux: Use the compiler of your choice. Tested with
g++ 7.5.0. -
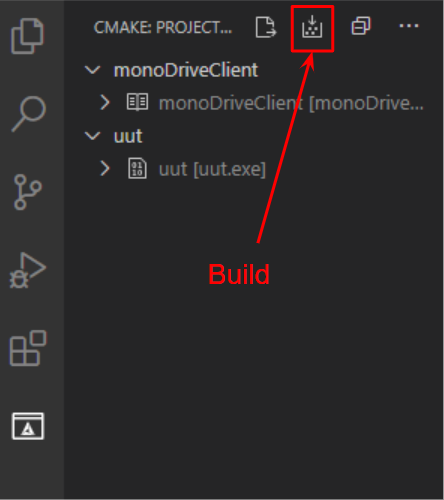
Build the client by clicking the
Build All Projectsicon:
Set Launch Target
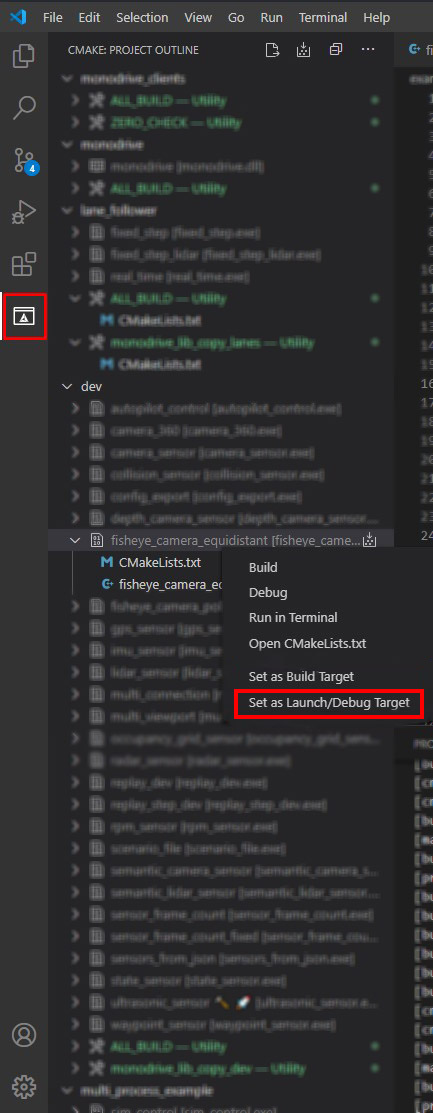
NOTE: Launching automatically fires off a build check in cmake so just setting the launch target will suffice.
Run Windows Example

Example configuration with fisheye_camera_equidistant as a build + launch target.
After you've set your build configuration and target, you can run by hitting F5 to run in debug or Ctrl+F5 to run without debugging.
Integration with CMake
You can include the monoDrive Simulator client in your existing CMake project
by adding the following lines to your CMakeLists.txt
# add monodrive client library from local repo
add_subdirectory(path/to/monodrive-client/monodrive mdclient)
# link targets as needed
target_link_libraries(<mytarget> monodrive)